Общие сведения о сварочных роботах контактной сварки
За последние годы в различных отраслях промышленности, в том числе и в области контактной сварки, начинают находить большое применение различные автоматические манипуляторы с программным управлением для выполнения целого комплекса основных (сборка, сварка, механическая обработка, окраска и др.) и вспомогательных (транспортирование, складирование, погрузка и разгрузка) работ.
С учетом технических возможностей роботов на рис. 1 представлены возможные области их использования в различных отраслях промышленности. Как видно из приведенных данных, область использования роботов в сварочном производстве достаточно широка и охватывает диапазоны перемещений от 0,8…0,9 мм до 2 м и создаваемых усилий на перемещение исполнительного органа от 80 до 1000 Н.
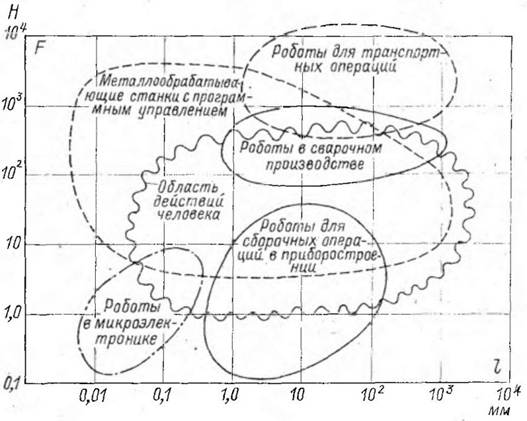
Рис. 1. Возможные области использования промышленных роботов в различных отраслях промышленности
Большие задачи по дальнейшему развитию и ускорению технического прогресса в области сварки еще более остро ставят вопрос о комплексной механизации и автоматизации сварочного производства. Применение роботов при комплексной механизации и автоматизации сварочных и вспомогательных процессов позволит значительно облегчить и ускорить решение этих задач.
Особенности технологического процесса контактной сварки требуют, чтобы робот имел высокоразвитую систему управления, способную обеспечить движение исполнительного органа робота одновременно по нескольким координатам, как от точки к точке, так и по криволинейной пространственной траектории. Большая производительность и точность позиционирования предъявляют требования к жесткости конструкции робота и точности работы схемы управления. Имеющиеся неточности в изготовлении и подгонке деталей под сварку также должны учитываться при выборе и разработке соответствующих узлов робота. Немаловажную роль играют процессы обучения и программирования работы робота.